Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
After an incredible run, I’ve left the Tesla Optimus team to co-found a new venture, Mondo Tech (妙动科技), alongside my long-time friend and business partner from DJI, Soren. We’re building teams in both Palo Alto and Shenzhen.
Published:
My new personal website is online.
An opensource quadruped robot controller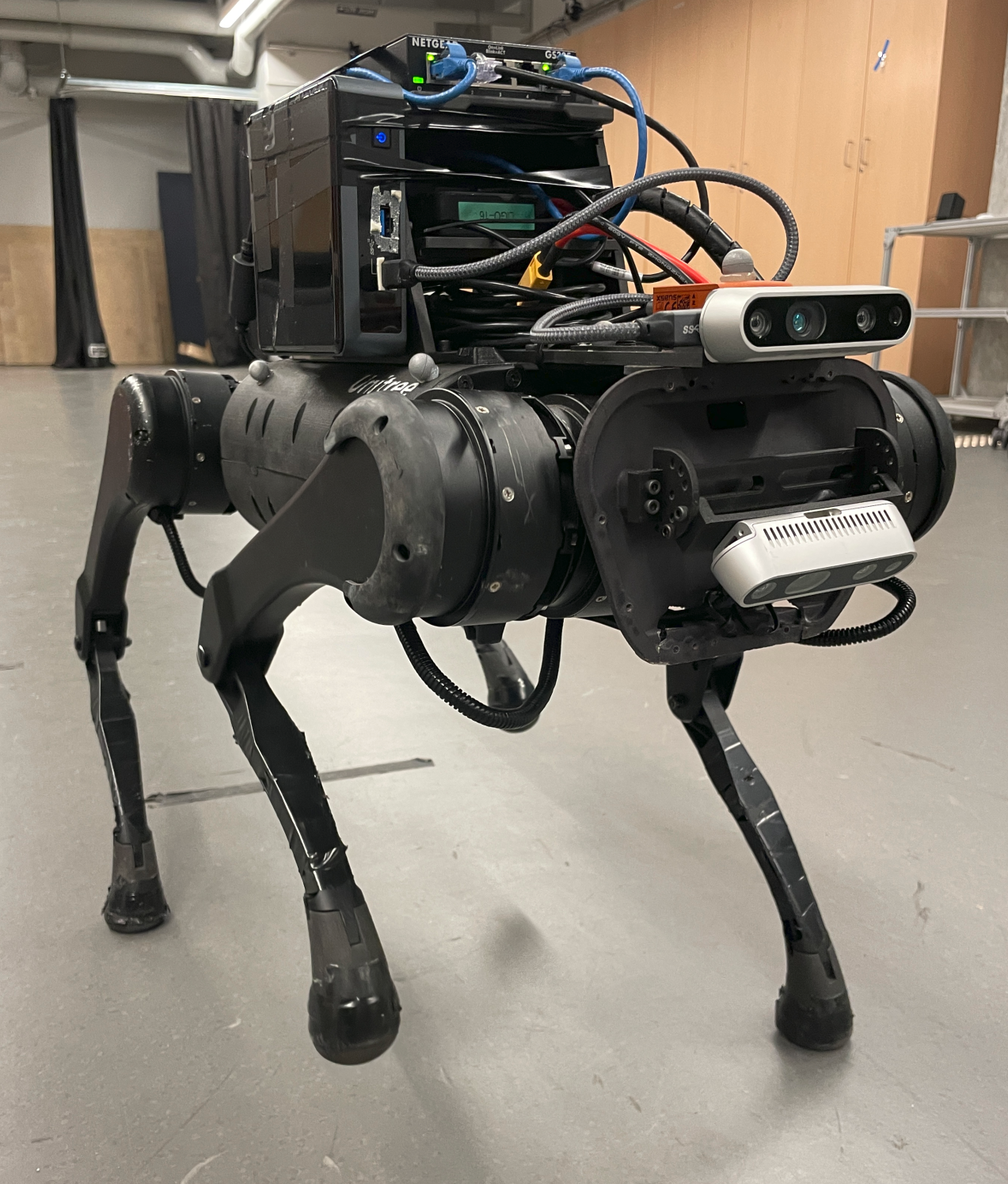
A dynamical brachiation robot I made for CMU 24775 course project 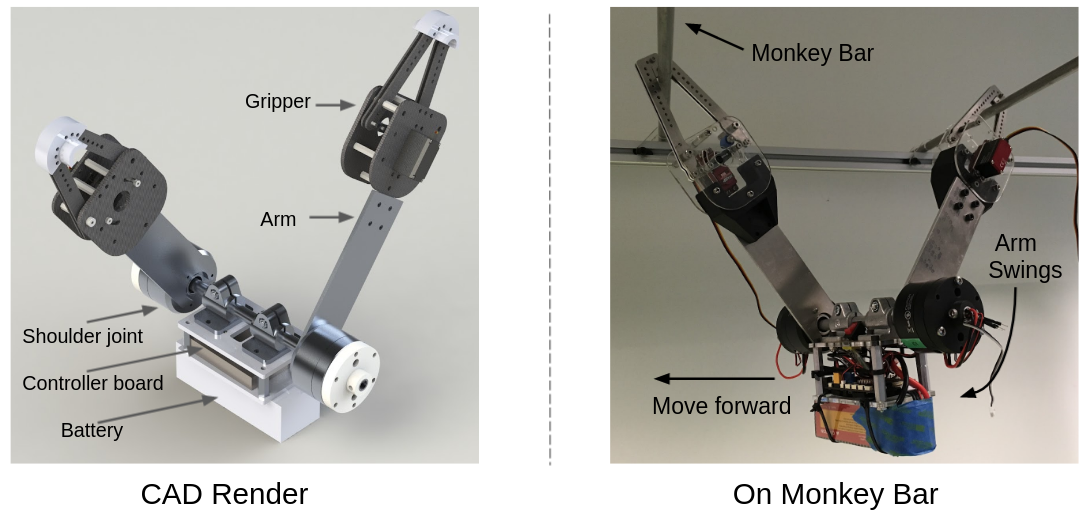
Published in 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015
Vision based landing controller.
Recommended citation: Shuo, Yang, Jiahang Ying, Yang Lu, and Zexiang Li. "Precise quadrotor autonomous landing with SRUKF vision perception." In 2015 IEEE international conference on robotics and automation (ICRA), pp. 2196-2201. IEEE, 2015. https://ieeexplore.ieee.org/abstract/document/7139489
Published in 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015
A quadrotor controller developed by me and my DJI colleagues.
Recommended citation: Yu, Yun, Shuo Yang, Mingxi Wang, Cheng Li, and Zexiang Li. "High performance full attitude control of a quadrotor on SO (3)." In 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 1698-1703. IEEE, 2015. https://ieeexplore.ieee.org/abstract/document/7139416
Published in 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
A theoratical attempt to unify trajectory generation and state estimation.
Recommended citation: Yang, Shuo, Gerry Chen, Yetong Zhang, Howie Choset, and Frank Dellaert. "Equality constrained linear optimal control with factor graphs." In 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 9717-9723. IEEE, 2021. https://ieeexplore.ieee.org/abstract/document/9562000
Published in IEEE Robotics And Automation Letters & 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Calibrate kinematic parameters online for legged robots.
Recommended citation: Yang, Shuo and Choset, Howie and Manchester, Zachary. "Online Kinematic Calibration for Legged Robots," in IEEE Robotics and Automation Letters, 2022, doi: 10.1109/LRA.2022.3186501 https://ieeexplore.ieee.org/document/9807408
Published in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
A MPC controller for a novel quadruped robot
Recommended citation: Chi-yen Lee and Yang, Shuo and Bokser, Benjamin and Manchester, Zachary. "Enhanced Balance for Legged Robots Using Reaction Wheels; In 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023.
Published in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
A Visual-Inertial-Leg Odometry
Recommended citation: Yang, Shuo and Zhang, Zixin and Fu, Zhengyu and Manchester, Zachary. "Cerberus: Low-Drift Visual-Inertial-Leg Odometry For Agile Locomotion; In 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023.
Published in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
A Multi-IMU Leg Odometry
Recommended citation: Yang S, Zhang Z, Bokser B, et al. Multi-IMU Proprioceptive Odometry for Legged Robots[C]//2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023: 774-779.
Published in IEEE Transactions on Robotics, 2024
contact-implicit model predictive control
Recommended citation: Le Cleach, Simon and Howell, Taylor A and Yang, Shuo and Lee, Chi-Yen and Zhang, John and Bishop, Arun and Schwager, Mac and Manchester, Zachary. Fast contact-implicit model predictive control. IEEE Transactions on Robotics
Undergraduate course, CMU, Mechanical Engineering, 2020
This first course on the modeling and analysis of dynamic systems concentrates on the motion of particles, systems of particles, and rigid bodies under the action of forces and moments. Topics include the kinematics of motion in rectangular, polar, and intrinsic coordinates; relative motion analysis with multiple reference frames; and planar kinetics through the second law, work-energy method, and impulse-momentum method. Time and frequency domain solutions to first and second order equations of motion are discussed.
Undergraduate course, CMU, Mechanical Engineering, 2021
This second course on the modeling and analysis of dynamic systems emphasizes the common features, which are exhibited by physical systems that include mechanical, hydraulic, pneumatic, thermal, electrical, and electromechanical elements. State equations and the concepts of equilibrium, linearization, and stability are discussed. Time and frequency domain solutions are developed.