Cofounder and CTO of Mondo Tech
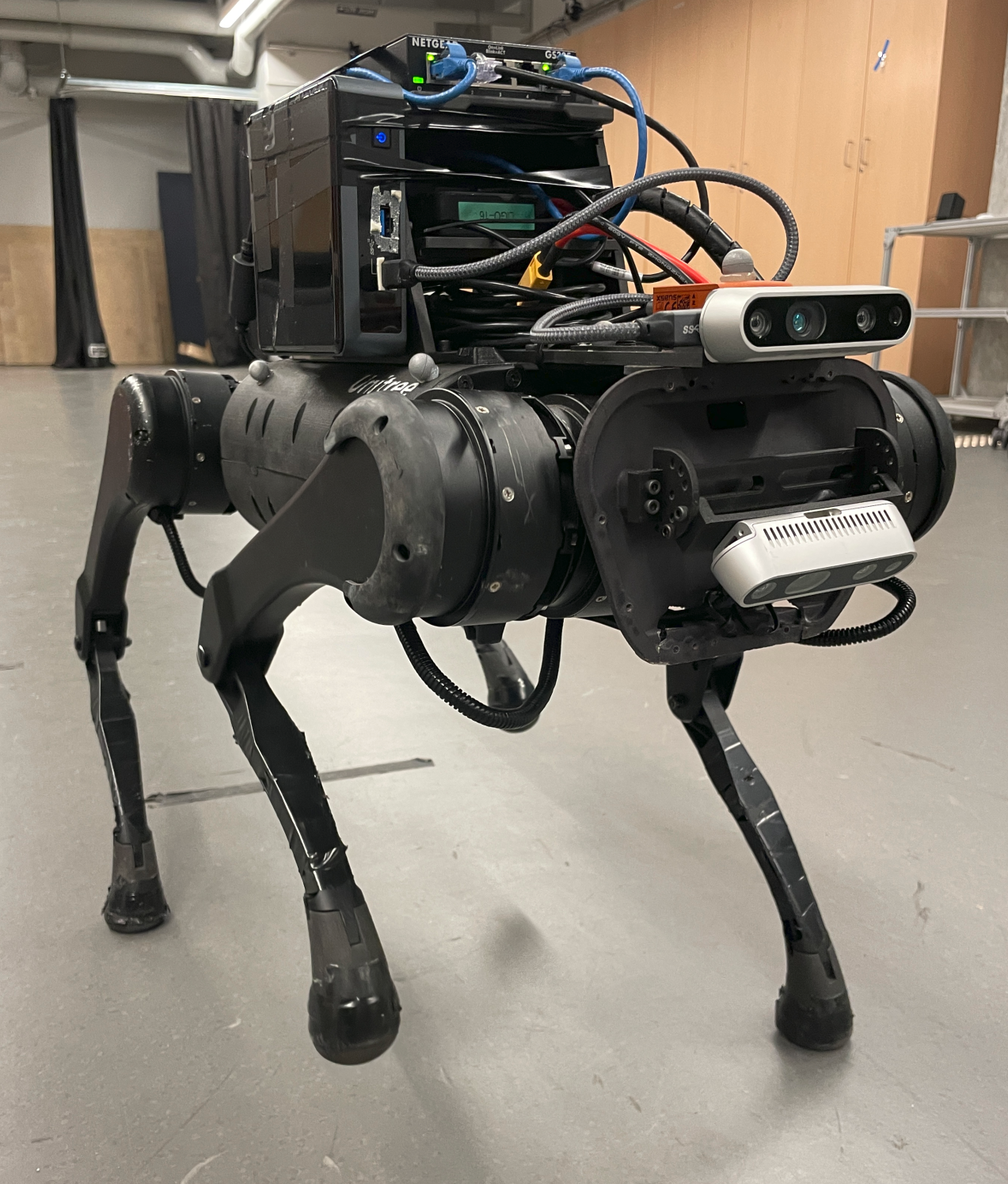
An opensource quadruped robot controller
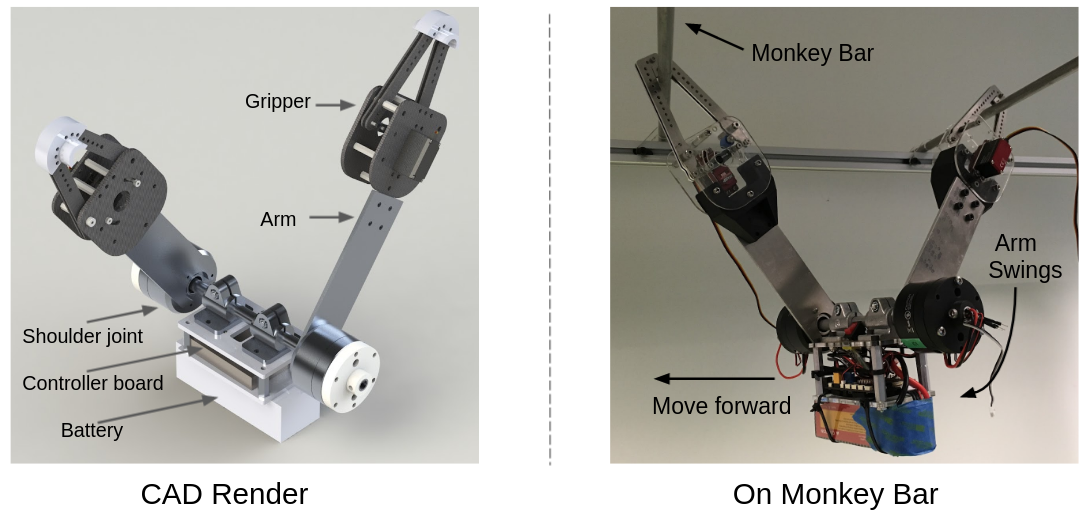
A dynamical brachiation robot I made for CMU 24775 course project